Autowareとは
Autowareは、ROS(Robot Operating System)をベースとした自動運転システム用オープンソースソフトウェアです。自己位置推定、物体検出、経路計画、車両制御などの自動運転に必要な機能を包括的に提供しており、様々な車両・用途での商用利用が可能です。
eSOLは自動運転技術の業界標準を目指す国際業界団体「The Autoware Foundation」にインダストリメンバーとして参画し、Autowareの商用化に向けた活動を行っています。Autowareの立ち上げ時からプロジェクトに参画し、メニーコアとeSOLのスケーラブルリアルタイムOS「eMCOS ®」を用いた実車での実験・デモなどを共同で行ってきました。またAutowareやROSを利用する企業に対してエンジニアリングサービスを提供し、製品の社会実装や商用化を支援しています。
スケーラブルリアルタイムOS「eMCOS」とは
eMCOSはマイコンからマルチ・メニーコアプロセッサ、マルチチップまでをスケーラブルにサポートした商用では世界初のリアルタイムOSです。従来のリアルタイムOSとはまったく異なるアーキテクチャ「分散型マイクロカーネルアーキテクチャ」と、独自のスケジューリング技術「セミプライオリティベーススケジューリング」(特許取得)を実装しています。これらの技術により、高いパフォーマンスとスケーラビリティに加えて、組込みシステムに不可欠なリアルタイム性の両立を実現しています。
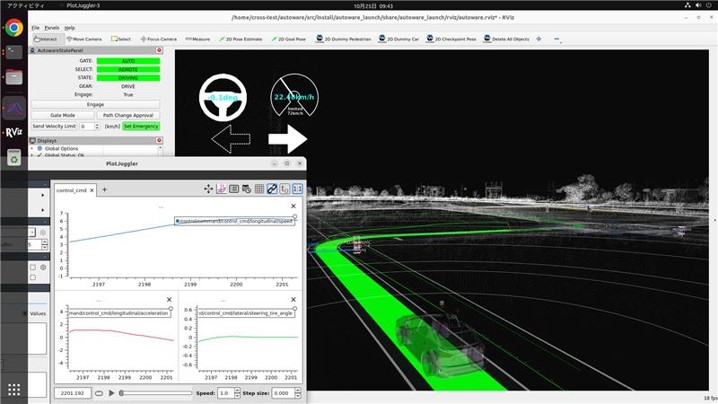
eMCOS 適用事例:自動運転プラットフォーム
eMCOSに最新のROS 2とAutowareを搭載した自動運転プラットフォーム
AutowareはOSにオープンソースのLinuxを用いますが、Linuxの代わりにeMCOSを採用することで、商用化に耐えうる高度なリアルタイム性能と信頼性を実現します。
eMCOSを利用することで、開発者は以下のようなメリットを享受できます。
- 商用製品で用いられる様々な組込みプロセッサでAutowareの機能を利用できます。
- ミッションクリティカルな処理とその他の処理を適切に統合・分離することができ、システム全体の安全性や信頼性を向上させることができます。
- OS、通信ミドルウェア、ツールチェーン等の基盤ソフトウェアに対する検証コストを削減できます。また基盤ソフトウェアに対するテクニカルサポートを受けることができ、製品価値を向上させるアプリケーションの開発に集中できます。
- 車載ソフトウェアで広く用いられるAUTOSARなど別のソフトウェアプラットフォームとも、効率的に連携することができます。
関連動画
|

関連資料

|

|



オンライン無料相談会もご利用ください。
Zoomなどのオンライン会議ツールで行える無料相談会を実施しています。弊社社員と時間を設けて会話しながら相談したい、という場合は、ぜひこちらをご活用ください。